在軟體機器人研究領域,一項來自中國科學技術大學的創新成果引起了廣泛關注。該校Nikolaos Freris特任教授及其研究團隊,攜手魏熹特任副研究員,共同揭示了軟體機器人設計的新篇章。
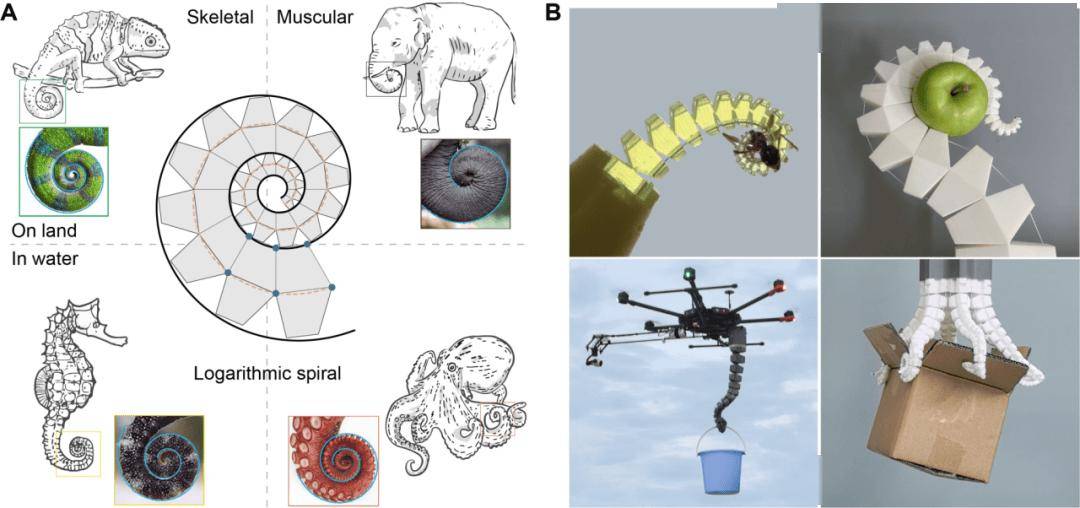
自然界中的生物柔性肢體,如象鼻的靈活卷曲、章魚觸手的敏捷捕捉、海馬的優雅游動以及變色龍尾巴的快速變換,一直是科學家們探索軟體機器人靈感的源泉。通過對這些生物形態和運動的深入觀察與數學抽象,研究團隊首次提出并設計了一種基于對數螺旋線結構的新型螺旋軟體機器人。
這款螺旋軟體機器人不僅在外形上模仿了自然界的生物特征,更在功能上展現了其在多維度和多場景中執行復雜抓取和操作任務的能力。據悉,相關研究成果已于2024年末在Cell Press旗下的權威期刊Device上發表,題為“SpiRobs: Logarithmic Spiral-shaped Robots for Versatile Grasping Across Scales”。
軟體機器人作為機器人領域的前沿課題,因其安全性和靈活性而備受矚目。然而,現有的軟體機器人在關鍵性能指標上,如靈巧性、運動速度和協作交互能力,仍與自然界生物的柔性肢體存在較大差距。為了克服這一挑戰,研究團隊通過數學抽象和建模,提煉出生物柔性肢體的形態學共性,并在此基礎上設計出了一類具有普適性和可擴展性的軟體機器人——螺旋機器人。
除了設計上的創新,研究團隊還提出了一種逆向設計方法來實現螺旋機器人。他們首先確定機器人的極限卷曲形態,即遵循對數螺旋線方程,然后將螺旋線進行離散,展開得到機器人的直線形主體設計。這一方法使得機器人的設計和制備更加精準和高效。
研究團隊還進一步提出了一種仿生抓取策略,并基于簡單的電流感知和控制,即可實現對不同位置、不同物體的自動抓取。這一策略克服了傳統方法中對于高精度傳感器和復雜建模與控制方法的依賴,為軟體機器人的實際應用提供了更加便捷和高效的解決方案。
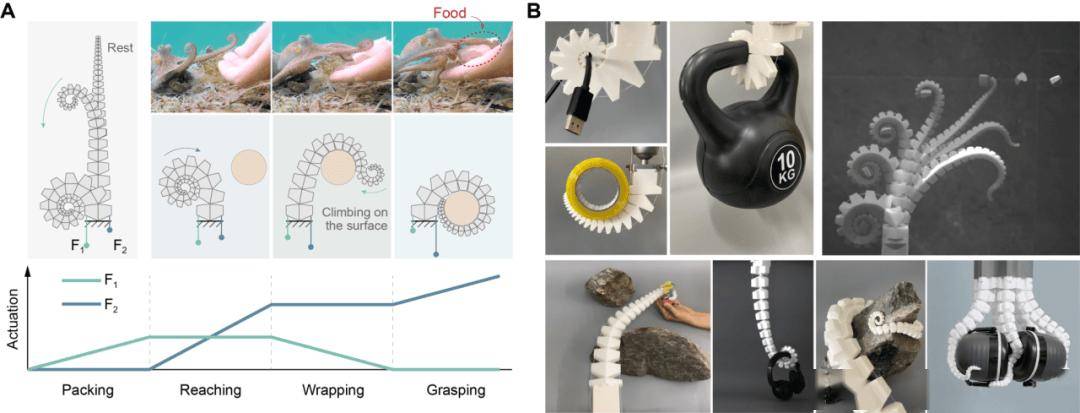
圖中展示了螺旋機器人的操作策略及應用場景,包括其在多維度和多場景中執行復雜抓取和操作任務的展示。這些展示不僅驗證了螺旋機器人的優越性能,也為其在復雜抓取任務、人機交互、低空經濟產業等應用場景提供了技術支持和創新解決方案。
中國科學技術大學計算機科學與技術學院博士生王展翅作為論文的第一作者,與Nikolaos Freris特任教授和魏熹特任副研究員共同完成了這一研究。他們的合作不僅推動了軟體機器人領域的發展,也為未來的科技創新注入了新的活力。